ECE5725 Final Project
Navigation Car
A Project by Xingze Li and Guanlin Zhu.
Demonstration Video
Introduction
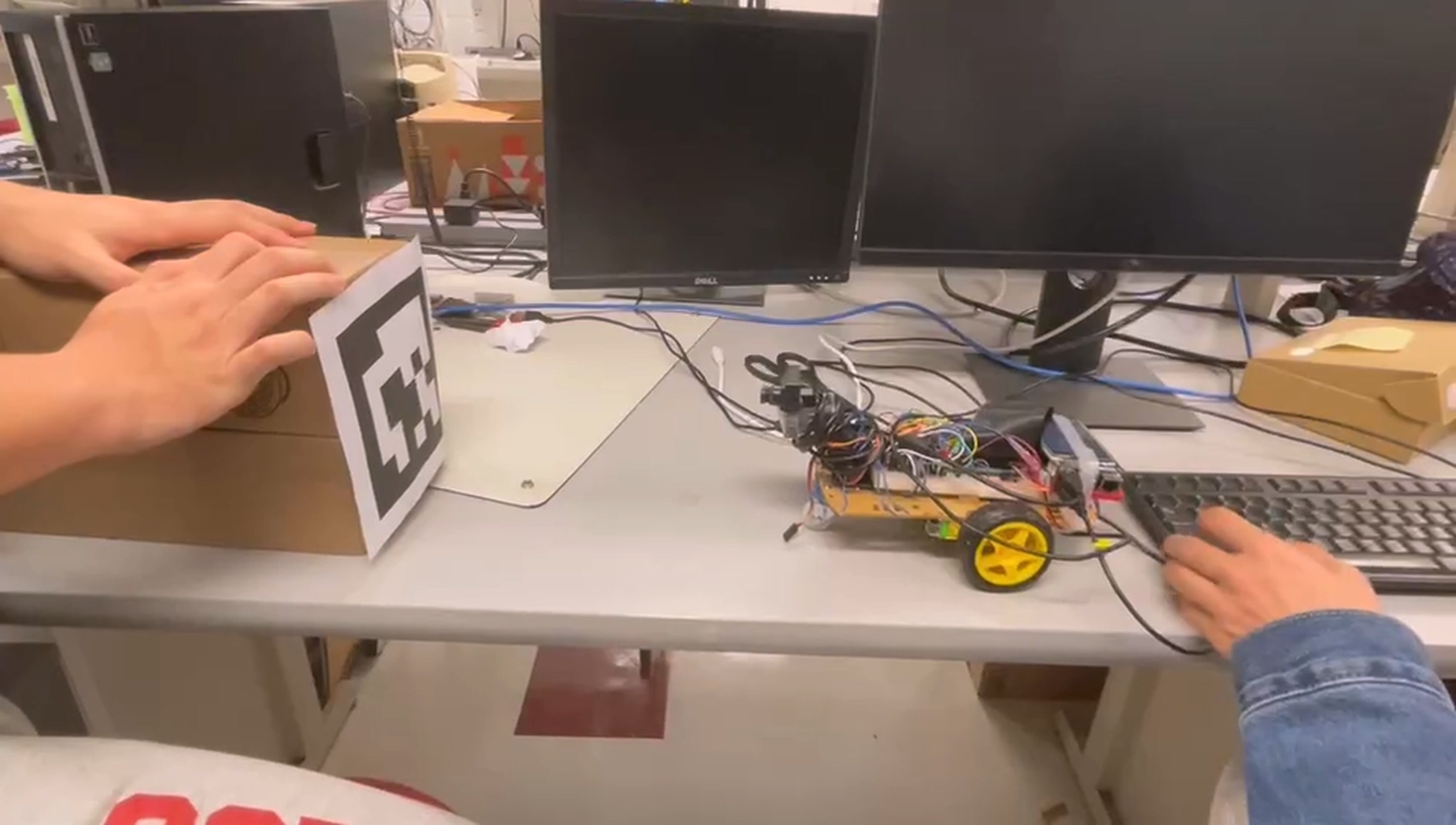
In this project, our group design a navigation car that can navigate people in a unfamiliar environment. For example, a freshman new to Phillips hall struggling to find a professor`s office can be led to destination with this car. We assemble motors, rasberry pi and an external camera to our robot car. With the help of OpenCV library and apriltag, the car make detection during running to search for the destination that indicated by the tag.
Project Objective:
- The final goal is that the car can run smoothly and navigate several paths that we set ahead.
- Make sure the navigation car can go straightforward in a long distance and detect the tag in a relative high wheeling speed and with high accuracy.
- Much better if the path can be chose through touching screen.
Design
In hardware aspect, we assemble a robot car and equip it with a camera. For boosting the detection, we add a gimble to enable the camera to rotate if it is needed. Both servo motor and gimble are controlled by PWM module. In software aspect, taking the advantage of OpenCV library, the rasberry pi can receive the video stream the camera captures. The method we use to formulate different specific paths is using apriltag. By labelling different tags along the entire path map, different sequential series of tags can be stored as paths lists. The details of tag implementation and function is during the time the camera sends video stream to rasberry pi, we call apriltag library to detect whether a tag appears in camera`s view. Since we use tag family 36h11, it detects which tag belonging to this family is detected. By decoding the return message and using math calculation, we acquire the distance between camera and tag. Then we can decide the next move like turn left or stop under a distance threshold. There is also a important point that keeping the car go straight, which is also by rectifying duty cycle of motor through math calculation on the basis of distance between tag and walls surrounding it. Once these separate parts are finished, we combine them together by using multi-processing in Python.
Testing
We design this project in a steppnig way, our universal design is make it just go straight line to detect a tag put in the end side and the the car stops. Once this version passes the test, we put more tags along the path and the task is still going along and stop but each tag must be detected though no extra responce is required. After this test, the car should make a turn after going straight for some time, passing some tags, then keep going straightforward. In the final version, the car should go through several paths, simple or complex. Apart from this, the car should also be initialized by interaction between user and screen of rasberry pi with the help of PyGame. But we fail to make it work correctly under multi-processing condition.
Result
We basically finish the implementation of the navigation robot which could function well with out test. For the test, we set several AprilTags in a rectangular area, the robot could dectect AprilTags successfully. Once the distance between our navigation robot and an AprilTag is shorter than the threshold which is set by us in our algorithm, the robot will switch to the mode correponding to the AprilTag(i.e., for an AprilTag on the corner, the robot could detect it and turn left or right as what we have designed in algorithm when the distance between the camera and this AprilTag is less than 0.5 meter). What’s more, the robot could keep itself driving at the correct direction by adjust the PWM of both motors when the robot could figure out the AprilTag deviates too much from the middle of the camera frame and the robot could perform well and stable if we set the AprilTag intensely on its way. Generally, most of the parts perform as planned but we also has met some problems during the progress. The camera which is adopted by us is too heavy for the gimble to carry it smoothly, so we discard the way of controlling the camera with bimbal functionand just fixed it to the board with some parts of gimbal. We meet 80%-90% of the goals outlined in the description.
Future Work
There are a lot of interesting and unexpected problems during the process of this project. The cmera which is adopted by us is too heave for the gimbal to carry, I would prefer switch to using a Raspberry Pi camera which could be hold by a gimbal and the robot is therefore able to adjust the camera to detect a tag from different angles. The motors’ performance will decrease as the power of batteries going down and we have to replace the old batteries with new ones frequently. I want to adopt rechargeable battery for the robot with a charging port on the board which could be recharge easily and it is also environment-friendly. In the last days of this project, we gradually found that the robot may perform better if it could stop for some time to adjust the camera and PWM of motors automatically in case the robot may miss some important tags if the camera is not able to detect them timely. What’s more, the robot may look more fantastic if we equip it with the part which could enable it to talk with people and this may make people who are served by this robot feel much better.
Work Distribution

Project group picture
Xingze Li
xl834@cornell.edu
Designed the mostly software architecture, testing.

Guanlin Zhu
gz243@cornell.edu
Designed the all hardware architecture, testing.
Parts List
- Raspberry Pi $35.00
- Raspberry Pi Camera V2 $25.00
- LEDs, Resistors and Wires - Provided in lab
Total: $60.00
References
PiCamera DocumentTower Pro Servo Datasheet
Bootstrap
Pigpio Library
R-Pi GPIO Document
Multi-processing
Apriltag
Code Appendix
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
548
549
550
import cv2
import math
import os
import time
from multiprocessing import Process, Queue, Value, Lock, Array
import subprocess
import RPi.GPIO as GPIO
import pygame
from pygame.locals import *
import apriltag
import argparse
# ------------------------
# --------GPIO set--------
# ------------------------
def GPIO_init():
GPIO.setmode(GPIO.BCM)
GPIO.setup(17, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(22, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(23, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(27, GPIO.IN, pull_up_down=GPIO.PUD_UP)
# left side control
GPIO.setwarnings(False)
GPIO.setup(26, GPIO.OUT)
GPIO.setup(5, GPIO.OUT)
GPIO.setup(6, GPIO.OUT)
# right side control
GPIO.setup(16, GPIO.OUT)
GPIO.setup(20, GPIO.OUT)
GPIO.setup(21, GPIO.OUT)
# set initial state
GPIO.output(5, GPIO.LOW)
GPIO.output(6, GPIO.LOW)
GPIO.output(20, GPIO.LOW)
GPIO.output(21, GPIO.LOW)
# setup callback routine
def GPIO17_callback(channel):
pwm_l.ChangeDutyCycle(100)
GPIO.output(5, GPIO.HIGH)
GPIO.output(6, GPIO.LOW)
pwm_r.ChangeDutyCycle(100)
GPIO.output(20, GPIO.HIGH)
GPIO.output(21, GPIO.LOW)
def GPIO22_callback(channel):
GPIO.output(5, GPIO.LOW)
GPIO.output(6, GPIO.LOW)
GPIO.output(20, GPIO.LOW)
GPIO.output(21, GPIO.LOW)
def GPIO23_callback(channel):
pwm_l.ChangeDutyCycle(100)
GPIO.output(5, GPIO.HIGH)
GPIO.output(6, GPIO.LOW)
pwm_r.ChangeDutyCycle(100)
GPIO.output(20, GPIO.HIGH)
GPIO.output(21, GPIO.LOW)
def GPIO27_callback(channel):
global run_flag
global arrive_flag
arrive_flag.value = 1
run_flag.value = 0
pwm_l.stop()
pwm_r.stop()
GPIO.cleanup()
exit()
l_cyc = 100
r_cyc = 89
def move_forward():
global l_cyc
global r_cyc
pwm_l.ChangeDutyCycle(l_cyc)
GPIO.output(5, GPIO.HIGH)
GPIO.output(6, GPIO.LOW)
pwm_r.ChangeDutyCycle(r_cyc)
GPIO.output(20, GPIO.HIGH)
GPIO.output(21, GPIO.LOW)
#time.sleep(t)
def motor_stop():
GPIO.output(5, GPIO.LOW)
GPIO.output(6, GPIO.LOW)
GPIO.output(20, GPIO.LOW)
GPIO.output(21, GPIO.LOW)
def move_backward():
pwm_l.ChangeDutyCycle(100)
GPIO.output(5, GPIO.LOW)
GPIO.output(6, GPIO.HIGH)
pwm_r.ChangeDutyCycle(100)
GPIO.output(20, GPIO.LOW)
GPIO.output(21, GPIO.HIGH)
def pivot_left():
GPIO.output(5, GPIO.LOW)
GPIO.output(6, GPIO.LOW)
pwm_r.ChangeDutyCycle(80)
GPIO.output(20, GPIO.HIGH)
GPIO.output(21, GPIO.LOW)
def pivot_right():
pwm_l.ChangeDutyCycle(100)
GPIO.output(5, GPIO.HIGH)
GPIO.output(6, GPIO.LOW)
GPIO.output(20, GPIO.LOW)
GPIO.output(21, GPIO.LOW)
def GPIO_event_init():
GPIO.add_event_detect(17,GPIO.FALLING,callback=GPIO17_callback,bouncetime=300)
GPIO.add_event_detect(22,GPIO.FALLING,callback=GPIO22_callback,bouncetime=300)
GPIO.add_event_detect(27,GPIO.FALLING,callback=GPIO27_callback,bouncetime=300)
P238_tag_list = [0]
P0_tag_list = [10]
P1_tag_list = [11]
P2_tag_list = [12]
def motor_rolling(detect2motor_queue, pwm_l, pwm_r):
#print("motor_rolling")
global l_cyc
global r_cyc
global run_flag
global activate
global arrive_flag
pwm_l.start(0)
pwm_r.start(0)
time0 = time.time()
destination = 3
route_tag_list = []
while(run_flag.value == 1 and arrive_flag.value == 0):
if(activate.value):
#destination = screen2motor_queue.get()
motor_queue_list = detect2motor_queue.get()
tag_id_list = motor_queue_list[0]
tag_id = -1
if(len(tag_id_list) == 0):
tag_id = -1
else:
tag_id = tag_id_list[0]
if tag_id not in route_tag_list:
route_tag_list.append(tag_id)
distance = motor_queue_list[1]
err = motor_queue_list[2]
print(err)
print(route_tag_list)
if(err>0.3):
l_cyc = 82
r_cyc = 95
elif(err < -0.3):
l_cyc = 95
r_cyc = 82
else:
l_cyc = 95
r_cyc = 89
#print('------------------')
#print("tag_id:{0}, distance:{1} in motor".format(tag_id, distance))
#print("route_tag_list:{0}".format(route_tag_list))
# the entire rolling logic
if(destination == -1):
#print("wait to start")
motor_stop()
elif(destination == 3 and route_tag_list == P0_tag_list and 0 < distance < 0.8):
#print("Arrive P238")
pivot_right()
time.sleep(0.6)
move_forward()
time.sleep(1)
arrive_flag.value = 1
elif(destination == 3 and route_tag_list == P1_tag_list and 0 < distance < 0.8):
#print("Arrive P")
pivot_right()
time.sleep(0.6)
move_forward()
time.sleep(1.5)
arrive_flag.value = 1
elif(destination == 3 and route_tag_list == P2_tag_list and 0 < distance < 0.5):
#print("Arrive P")
pivot_right()
time.sleep(0.8)
move_forward()
time.sleep(1.5)
arrive_flag.value = 1
elif(destination == 3 and route_tag_list == P238_tag_list and 0 < distance < 0.8):
#print("Arrive anthoy")
pivot_left()
time.sleep(0.55)
move_forward()
time.sleep(1.5)
#arrive_flag.value = 1
else:
#print("Keep Running")
move_forward()
route_tag_list = []
# after press 'q' to terminate video stream capture
if(motor_queue_list == "terminate"):
run_flag.value = 0
#except KeyboardInterrupt:
#print("except")
#run_flag.value = 0
#pwm_l.stop()
#pwm_r.stop()
#GPIO.cleanup()
time1 = time.time()
if(time1 - time0 > 180):
break
run_flag.value = 0
arrive_flag.value = 1
pwm_l.stop()
pwm_r.stop()
GPIO.cleanup()
quit()
#----------------------------
# Pygame initialization
#----------------------------
WHITE = 255, 255, 255
BLACK = 0, 0, 0
'''
os.putenv('SDL_VIDEODRIVER', 'fbcon') #display on piTFT
os.putenv('SDL_FBDEV', '/dev/fb0')
os.putenv('SDL_MOUSEDRV', 'TSLIB') #track mouse clicks on piTFT
os.putenv('SDL_MOUSEDEV', '/dev/input/touchscreen')
pygame.init()
pygame.mouse.set_visible(False)
# set screen
screen = pygame.display.set_mode((320, 240))
screen.fill(BLACK)
id_title = 'not detected'
id_pos = (160, 120)
my_font_0 = pygame.font.Font(None, 40)
my_button_0 = 'Start'
my_button_0_pos = (160, 120)
my_font_1 = pygame.font.Font(None, 40)
dest_button = {'P238':(40, 40), 'P':(40, 120)}
P238_title = {'Destination':(120, 20), 'P238':(200, 20)}
P238_state = ['Tag1', 'No detection']
P238_state_pos = [(40, 80), (100, 80)]
P_title = {'Destination':(120, 20), 'P2':(200, 20)}
P_state = ['Tag1', 'No detection', 'Tag2', 'No detection']
P_state_pos = []
# initialize button
def draw_start_button():
start_surface = my_font_0.render(my_button_0, True, WHITE)
start_rect = start_surface.get_rect(center=(my_button_0_pos))
screen.blit(start_surface, start_rect)
def draw_dest_button():
for dest, dest_pos in dest_button.items():
dest_surface = my_font_1.render(dest, True, WHITE)
dest_rect = dest_surface.get_rect(center=(dest_pos))
screen.blit(dest_surface, dest_rect)
# initialize title
def draw_title(destination):
if destination == 1:
room_title = P238_title
elif destination == 2:
room_title = P_title
for title, title_pos in room_title.items():
title_surface = my_font_1.render(title, True, WHITE)
title_rect = title_surface.get_rect(center=title_pos)
screen.blit(title_surface, title_rect)
# initialize state label
def draw_state_label(destination):
if destination == 1:
room_state = P238_state
room_state_pos = P238_state_pos
elif destination == 2:
room_state = P_state
room_state_pos = P_state_pos
for idx in range(len(room_state)):
state_surface = my_font_1.render(room_state[idx], True, WHITE)
state_rect = state_surface.get_rect(center=room_state_pos[idx])
screen.blit(state_surface, state_rect)
def show_screen(detect2motor_queue):
global run_flag
global arrive_flag
route_tag_id = []
tag_str = ""
while(arrive_flag.value == 0 and run_flag.value == 1):
screen.fill(BLACK)
motor_queue_list = detect2motor_queue.get()
#print(motor_queue_list)
if(len(motor_queue_list[0])):
tag_id_list = motor_queue_list[0]
tag_id = tag_id_list[0]
if tag_id not in route_tag_id:
route_tag_id.append(tag_id)
id_title = str(tag_id)
tag_str += id_title + ", "
id_surface = my_font_1.render(tag_str, True, WHITE)
id_rect = id_surface.get_rect(center=(id_pos))
screen.blit(id_surface, id_rect)
pygame.display.flip()
time.sleep(0.5)
exit()
'''
'''
# draw start button
draw_start_button()
pygame.display.flip()
start = 0
choose_destination = 1
destination = -1
while(arrive_flag.value == 0):
screen.fill(BLACK)
if start == 0:
draw_start_button()
#else:
# draw_dest_button()
# ----detect screen touch event----
for event in pygame.event.get():
if(event.type is MOUSEBUTTONDOWN):
pos = pygame.mouse.get_pos()
elif(event.type is MOUSEBUTTONUP):
pos = pygame.mouse.get_pos()
x, y = pos
if start == 0 and 140 < x < 180 and 100 < y < 140:
start = 1
activate.value = 1
elif start == 1 and choose_destination == 1:
# select the destination
draw_dest_button()
if 0 < x < 80 and 0 < y < 80:
destination = 1
choose_destination = 0
elif 0 < x < 80 and 80 < y < 160:
destination = 2
choose_destination = 0
screen2motor_queue.put(destination)
#choose_destination = 0
if start == 1 and choose_destination == 0:
draw_title(destination)
draw_state_label(destination)
pygame.display.flip()
'''
#----------------------------
#---------tag Detect---------
#----------------------------
def tagDetect(image):
#path = "/home/pi/lab_final/images/tag36h11_0.png"
# construct the argument parser adn parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", required=True, help="no")
args = vars(ap.parse_args())
# load the input image and convert it to grayscale
# print("Loading images")
# image = cv2.imread(path)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# define the AprilTags detector and the detect the AprilTags
# in the input image
#print("Detecting tags")
options = apriltag.DetectorOptions(families="tag36h11")
detector = apriltag.Detector(options)
results = detector.detect(gray)
#print("{0} total AprilTags Detected".format(len(results)))
avg_tagWidth = 0
tag_ids = []
err = 0.0
# loop over the AprilTag detection results
for count, r in enumerate(results):
tag_ids.append(r.tag_id)
# extract the bounding box (x, y), the cooordinates and convert to pairs
(ptA, ptB, ptC, ptD) = r.corners
ptA = (int(ptA[0]), int(ptA[1]))
ptB = (int(ptB[0]), int(ptB[1]))
ptC = (int(ptC[0]), int(ptC[1]))
ptD = (int(ptD[0]), int(ptD[1]))
avg_tagWidth += abs(int(ptA[0]) - int(ptB[0]))
avg_tagWidth /= (count + 1)
d_left = int((ptA[0] + ptD[0])/2)
d_right = 1280 - int((ptB[0] + ptD[0])/2)
err = 2*(d_right - d_left)/(d_right + d_left)
# draw the bounding box of the AprilTag detection
cv2.line(image, ptA, ptB, (0, 255, 0), 2)
cv2.line(image, ptB, ptC, (0, 255, 0), 2)
cv2.line(image, ptC, ptD, (0, 255, 0), 2)
cv2.line(image, ptD, ptA, (0, 255, 0), 2)
# draw the center (x, y) -- coordinates of the AprilTag
(cX, cY) = (int(r.center[0]), int(r.center[1]))
cv2.circle(image, (cX, cY), 5, (0, 0, 255), -1)
# draw the tag family on the image
tagFamily = r.tag_family.decode("utf-8")
cv2.putText(image, tagFamily, (ptA[0], ptA[1] - 15),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
#print("tag family : {0}".format(tagFamily))
return image, avg_tagWidth, tag_ids, err
#----------------------------
#--------get distance--------
#----------------------------
def get_focalLength(frame, avg_tagWidth):
return KNOW_DISTANCE * avg_tagWidth / KNOW_WIDTH
def getDistance(detect2motor_queue, threshold):
# capture the video stream
video_stream = cv2.VideoCapture(0)
# acquire the average focallength
KNOW_DISTANCE = 0.7
KNOW_WIDTH = 0.173
# pixels
FOCAL_LENGTH = 790
distance = -1
detect = 0
turn = 0
tag_ids = []
global run_flag
global arrive_flag
while (run_flag.value == 1 and arrive_flag.value == 0):
if(activate.value == 1):
try:
# acquire video stream
rect, frame = video_stream.read()
# generate detected image
image, avg_tagWidth, tag_ids, err = tagDetect(frame)
# calculate distance
if(math.isclose(avg_tagWidth, 0.0) == False):
distance = KNOW_WIDTH * FOCAL_LENGTH / avg_tagWidth
detect = 1
else:
distance = -1
detect = 0
# detect corner, when to turn
#if(distance < threshold):
# turn = 1
# send_motor_queue.put(turn)
motor_queue_list = []
motor_queue_list.append(tag_ids)
motor_queue_list.append(distance)
motor_queue_list.append(err)
#print("motor_queue_list:", motor_queue_list)
detect2motor_queue.put(motor_queue_list)
# show image
#cv2.namedWindow("Detection", cv2.WINDOW_NORMAL)
#cv2.resizeWindow("Detection", 320, 160)
#font = cv2.FONT_HERSHEY_TRIPLEX
#if(detect == 1):
# cv2.putText(image, 'D: {0}'.format(round(distance, 2)), (20, 100), font, 3, (0, 0, 255), 3)
#else:
# cv2.putText(image, 'NO TAG', (20, 100), font, 3, (0, 0, 255), 3)
#cv2.imshow("Detection", image)
if cv2.waitKey(10) & 0xFF == ord('q'):
break
except KeyboardInterrupt:
run_flag.value = 0
detect2motor_queue.put("terminate")
video_stream.release()
#cv2.destroyAllWindows()
#-----------------------
#-------main------------
#-----------------------
if __name__ == "__main__":
time.sleep(2)
# init GPIO
GPIO_init()
GPIO_event_init()
# create the PWM instance
pwm_l = GPIO.PWM(26, 50)
pwm_r = GPIO.PWM(16, 50)
# run_flag is used to safely exit all process
run_flag = Value('i', 1)
activate = Value('i', 1)
arrive_flag = Value('i', 0)
# thread queue
detect2motor_queue = Queue()
#screen2motor_queue = Queue()
p_start_lock = Lock()
p_end_lock = Lock()
# start process
threshold = 0.5
#p0 = Process(target=show_screen, args=(detect2motor_queue, ))
p1 = Process(target=motor_rolling, args=(detect2motor_queue, pwm_l, pwm_r))
p2 = Process(target=getDistance, args=(detect2motor_queue, threshold))
#p0.start()
p1.start()
p2.start()
# wait for processes exit safely
#p0.join()
p1.join()
p2.join()
pwm_l.stop()
pwm_r.stop()
GPIO.cleanup()
print("quit")
exit()